Рассмотрим основные положения теории катастроф на примере катастрофы "сборка", которой соответствует дифференциальное уравнение
dx/dt = -х3 +bx+a.
(13.1)
При варьировании значений параметров а и b поведение системы (число стационарных точек, их расположение) будет также меняться. Для изучения качественного характера этих изменений рассмотрим потенциальную функцию
F(x,a,b) = х4 / 4 - bx2 / 2 - ах.
Заметим, что -dF/дх - -х3+bх+а. На рис. 13.1 приведены двухмерные графики, характеризующие поведение функции F.
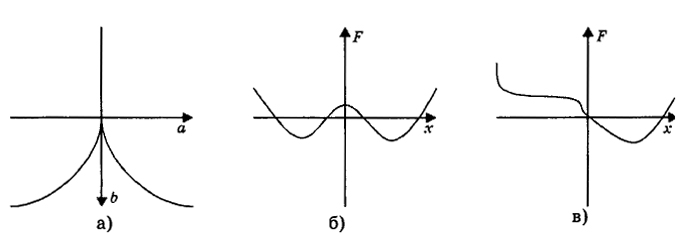
Рис. 13.1. Графики потенциальной функции
251
На рис 13.1,а изображена так называемая бифуркационная кривая (4b3 - 27а2). Эта кривая разделяет плоскость (а, Ь) на две части. Внутри кривой функция F имеет два минимума (рис. 13.1,6). За пределами этой кривой функция F имеет только один минимум (рис. 13.1,в). Как известно, экстремальные значения функции F можно определить, приравняв нулю первую производную:
х3- bх - а = 0.
(13.2)
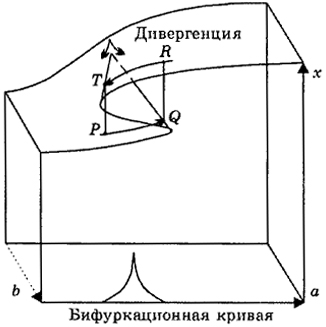
Рис. 13.2. Катастрофа "сборка"
Заметим, что это же уравнение определяет стационарные точки дифференциального уравнения (13.1).
Если в трехмерном пространстве по вертикальной оси отложить положения особых точек уравнения (13.1) х*, а по двум другим осям - значения параметров а и b, то получим поверхность катстроф (рис. 13.2). Проекция на плоскость параметров (а,b) точек поверхности, в которых имеется вертикальная касательная, даст бифуркационную кривую.
Перепишем уравнение (13.2) в следующем виде:
z = хy - z = 0,
(13.3)
где у = b; z = а. Можно считать, что это уравнение задает нелинейную функцию, в которой у и г - независимые переменные, а х - зависимая. График этой функции можно нарисовать в трехмерном пространстве с помощью Excel. Главная трудность в изучении рассматриваемой функции заключается в том, что при некоторых значениях независимых переменных эта функция становится неоднозначной. Тем не менее график такой функции построить можно. Допустим, что в функции (13.3) зависимой переменной является z, тогда можно записать
2 = х3 - ху,
(13.4)
а это уже обычная функция двух переменных х и у, и ее можно построить с помощью электронных таблиц.
252
Целесообразно также провести исследование функции z, построив серию графиков при фиксированных значениях у из интервала (-5;5).
Как указывалось в § 12.3, основными характеристиками фазового портрета на плоскости являются положения равновесия и предельные циклы. Сепаратрисы связывают седловые положения равновесия с особыми точками и предельными циклами. Если менять параметры структурно-устойчивой системы, то ее фазовый портрет будет также меняться, но его топологическая структура в определенном диапазоне значений параметра будет оставаться постоянной. При достижении критических значений параметров происходит бифуркация - меняется топологическая структура фазового портрета. Качественное исследование динамической системы, зависящей от параметров, предполагает описание всех возможных в ней бифуркаций и определение множества бифуркационных значений параметров.
Рассмотрим системы, зависящие от одного параметра. Вернемся к рис. 12.5, на котором изображены типичные фазовые портреты в окрестности точки равновесия. В двух случаях положение равновесия является устойчивым: устойчивые фокус и седло, и в трех - неустойчивым: седло и неустойчивые узел и фокус.
Если в процессе изменения системы параметр подходит к бифуркационному значению, то либо два положения равновесия сливаются и "умирают" (система совершает скачок, перескочив на другой режим), либо "рождается" пара положений равновесия. Причем из двух положений равновесия одно устойчиво, а другое неустойчиво.
Ситуация возникновения предельного цикла может быть проиллюстрирована следующей системой уравнений:
| { |
dr/dt = λr - r3; |
| dφ/dt = c |
(13.5)
где с - константа, r и φ - полярные координаты (х = rcos φ; у = rsin φ). Если λ < 0, то динамическая система (13.5) имеет один устойчивый фокус. Если параметр А. изменяется и становится положительным, то происходит бифуркация Хопфа, фокус теряет устойчивость и в системе возникает устойчивый предельный цикл с радиусом √λ [1]. Фазовый портрет системы (13.5) в этом случае будет состоять из траекторий, изнутри и снаружи "наматывающихся" на предельный цикл. Это означает,
253
что независимо от начального состояния система достаточно быстро перейдет в режим периодических колебаний (автоколебательный режим).
Рассмотрим бифуркации, связанные с предельными циклами. В этом случае возможны два варианта. При первом варианте из устойчивого фокуса при изменении параметра рождается устойчивый предельный цикл (рис. 13.3). В случае второго варианта при изменении параметра неустойчивый предельный цикл исчезает, и его неустойчивость передается положению равновесия - фокусу (рис. 13.4).

Рис. 13.3. Рождение цикла
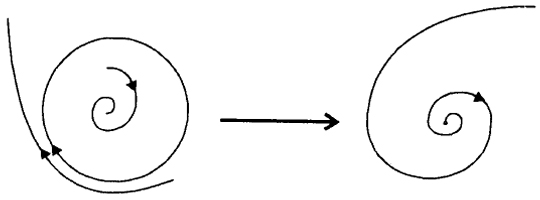
Рис. 13.4. Гибель цикла
В первом варианте после потери устойчивости положения равновесия устанавливается колебательный периодический режим (мягкая потеря устойчивости). Во втором варианте система уходит со стационарного режима скачком (жесткая потеря устойчивости) и переходит на другой режим движения [1].
Множество точек, к которым притягиваются траектории автономных систем, называется аттрактором. Для систем с двумя переменными существует только два типа аттракторов - особая точка и предельный цикл. В первом случае все изучаемые величины
254
с течением времени выходят на постоянные значения, во втором - на периодический режим.
При количестве переменных в системе N > 3 и наличии в правой части только линейных и квадратичных членов возможно возникновение странных аттракторов.
255
